Donnerstag, 28. April 2011


Schneckentrieb auslegen
Für einen elektrischen Antrieb soll eine Schraubradverzahnung bestehend aus einer Schnecke und einem Schneckenrad ausgelegt werden. Für die Optimierung der Zahngeometrie und der Eingriffsverhältnisse stehen für das Schneckenrad ein bestimmter Fräser bereit, der zur Herstellung dient. Darauf aufbauend wurde die Verzahnung des Schneckenrads mit Profilverschiebung und Achsabstand gewählt.
Zu erwähnen ist, dass die Schnecke aus C45 besteht, das Schneckenrad aus einem POM-Kunststoff (Delrin). Damit ist das Schneckenrad der schwächere Verzahnungspartner und benötigt stabilere Zähne, wohingehen die Zähne der Schnecke sehr dünn sein können.
Aufgrund des geringen E-Moduls von Kunststoff kann davon ausgegangen werden, dass bei Belastung mehre Kunststoffzähne im Eingriff sind, da diese sich leicht biegen lassen.
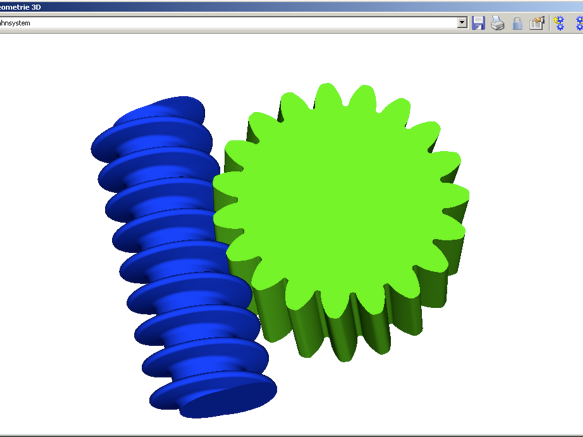
In den Basisdaten werden die grundsätzlichen Verzahnungsgrößen wie der Modul, die Zähnezahl, der Achsabstand und die Profilverschiebungen zueinander eingestellt und optimiert.
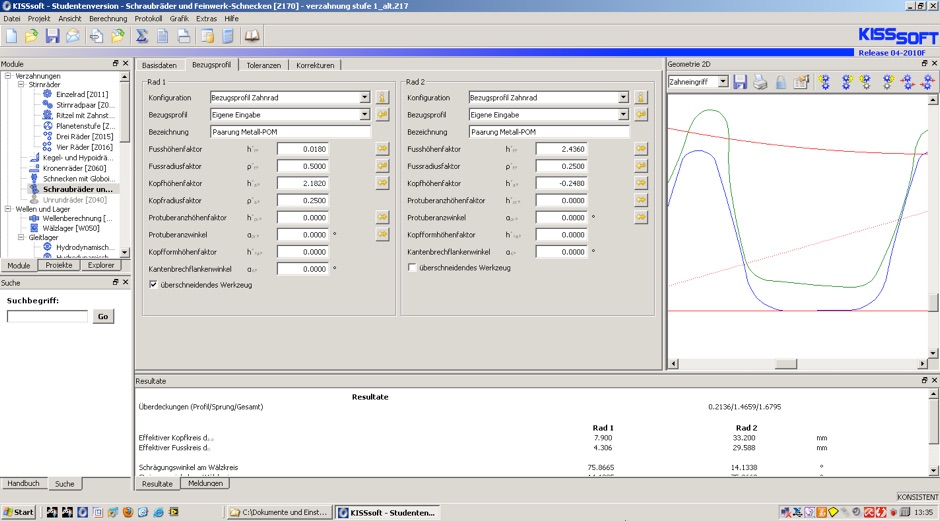
Beim Bezugsprofil kann die Gestalt der Zahnform verändert werden. So werden hier die Zahnlücke der Metallschnecke vergrößert und die des Kunststoffzahnrades verkleinert.
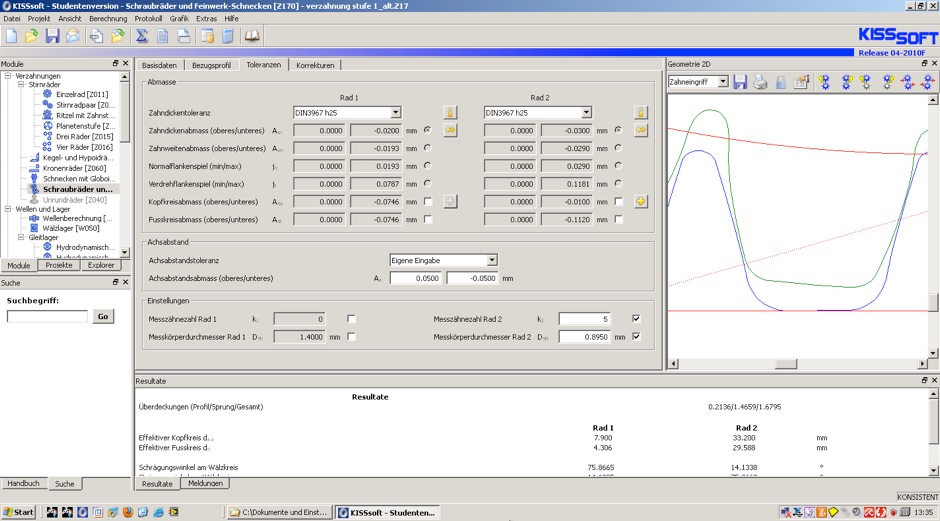
Im Bereich Toleranzen werden die zulässigen Abweichungen von Achsabstand und Zahngrößen eingestellt.
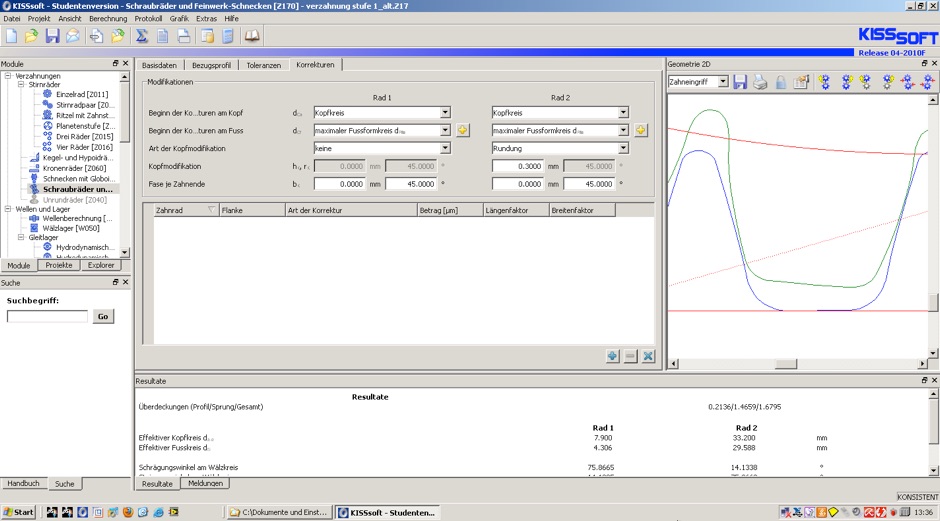
Korrekturen an der Rundung des Zahnkopfes dienen zu einer Glättung des Verlaufs der Eingriffssteifigkeit.
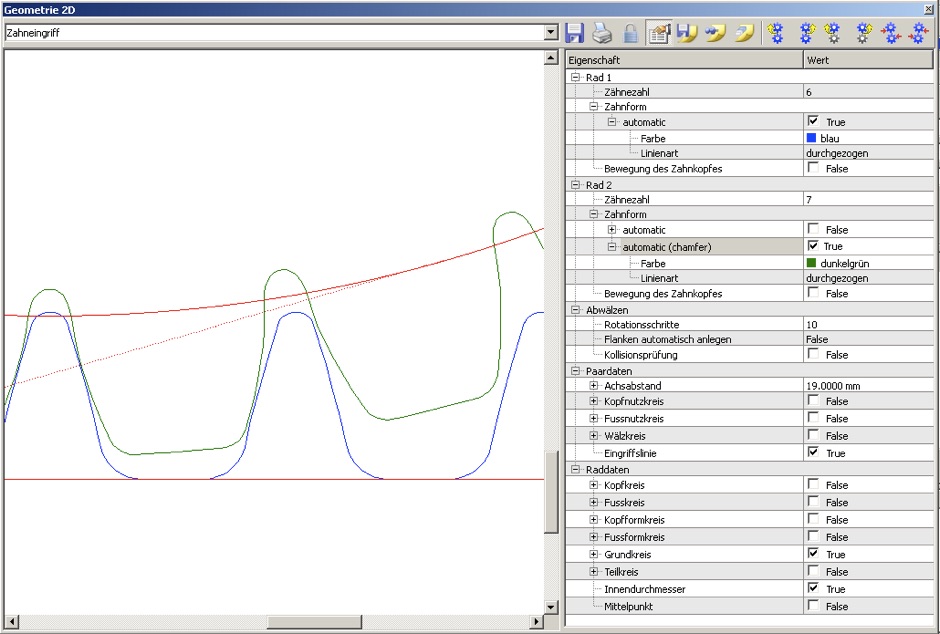
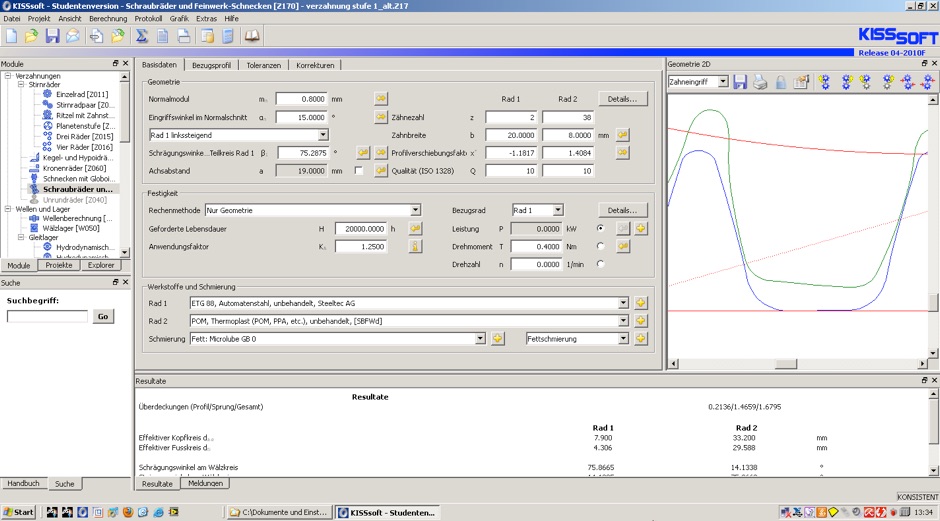
Den Zahneingriff kann man sich grafisch darstellen lassen. Über die Knöpfe rechts oben im Fenster kann eine Bewegung der Verzahnung ausgeführt und somit verschiedene Zahnstellungen begutachtet werden. Auch das Flankenspiel kann optisch angeschaut werden.
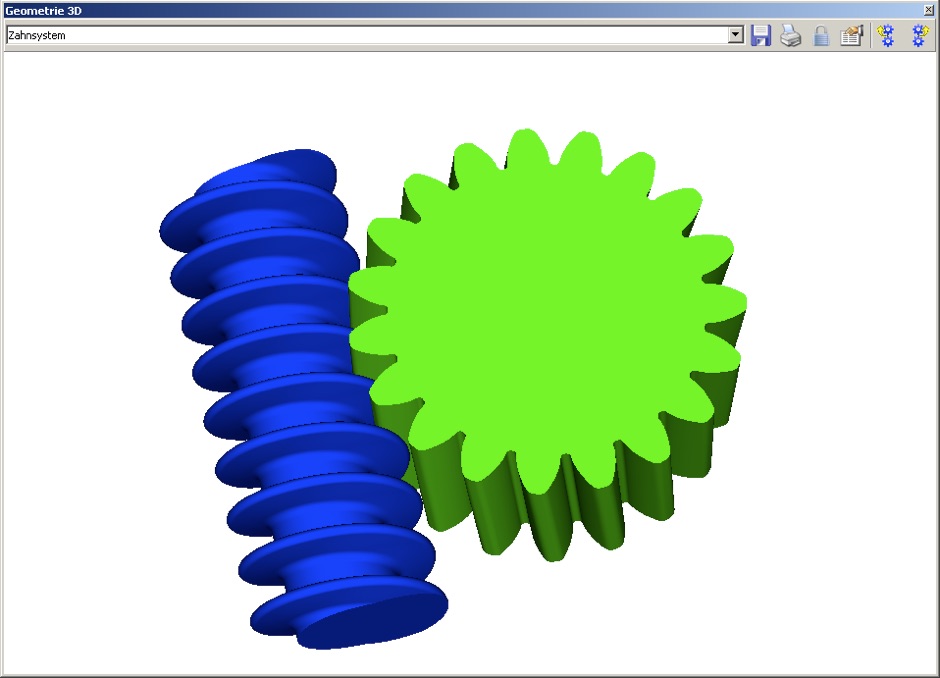
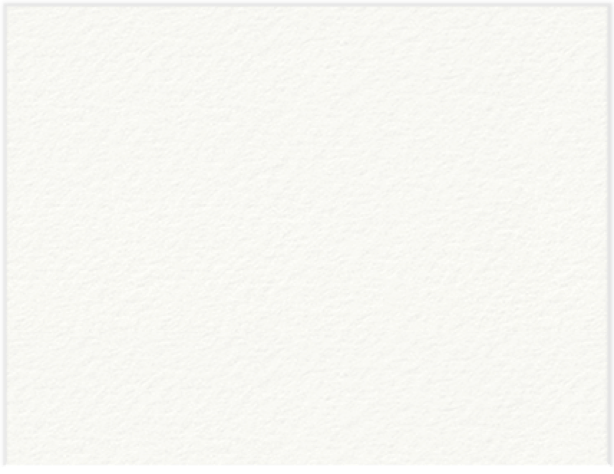
Auch im 3D-Modus kann das spätere Getriebe simuliert und die Eingriffsverhältnisse überprüft werden. Mit der Maus kann man das Bild beliebig drehen und vergrößern.
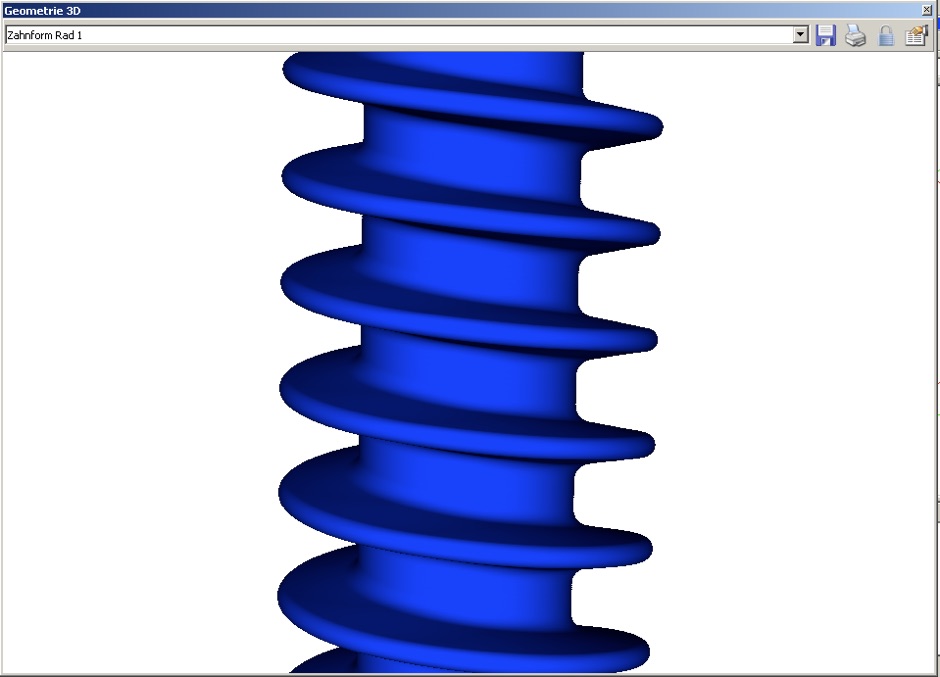
Geschafft. So sieht die fertige Schnecke von oben aus. Einer Weiterverarbeitung mit einem 3D-CAD-System steht nichts mehr im Wege.