Samstag, 8. Januar 2022



Prinzipien von Winkel-Lagegebern
Ein wesentliches Bauteil für eine lagegeregelte Richtachse ist neben dem Motor als Antriebselement ein Winkelgeber, der hochpräzise die aktuelle Ist-Position erfasst und dadurch eine Regelung der Position erst ermöglicht.
Es gibt verschiedene Arten der Winkellageerkennung: einmal Bauteile welche auf dem drehenden Teil eine oder mehrere Spuren von Dauermagneten haben. Je nach Winkelstellung der Welle befindet sich entweder digital ein magnetisches + oder – bei einer sich auf dem feststehenden Teil befindlichen Spule oder Hall-Sensor.
Ein Hall-Sensor kann nur digital erfassen (also nur +-Manget vorhanden ja/nein), eine Spule kann analog viele Zwischenmagnetfeldstärken erfassen. Da es immer einen Wechsel zwischen den Polen gibt beim Weiterdrehen ändert sich das Magnetfeld kontinuierlich und es wird eine sehr viel feinere Messauflösung mit einer Spule erreicht.
Resolver
Werden 3 Spulen eingesetzt deren Winkelposition 120° zueinander versetzt sind, so wird eine 3-phasige Spannung erzeugt ... ähnlich einem 3-phasigem Drehfeld eines Synchronmotors. Diese Messmethode nennt man Resolver. Dieser Aufbau ist bereits vor dem Zeitalter der Mikroelektronik existent, denn es werden nur 3 Spulen benötigt und das analoge Signal kann einfach mit einem Anzeigeinstrument - welches ebenfalls über 3 Spulen verfügt – wiedergegeben werden.
Es kommt dabei eine Auswerteelektronik zum Einsatz, wodurch diese einerseits günstig und robust sind. Ihre Eigenart ist aber dass sie alle Zwischenwerte für eine 360°-Wellenumdrehung detektieren können, kommen weitere Umdrehungen hinzu kann ein Resolver dies nicht unterscheiden. Es muss daher irgendwo außerhalb eine Zähleinheit aufgebaut werden um mehrere Umdrehungen voneinander unterscheiden zu können.
Encoder
Genau hier setzt das Prinzip eines anderen Bauteils an. Ein Encoder misst meist optisch (oder in Ausnahmefällen auch magnetisch). Die optische Messung in Verbindung mit integrierten Messgetrieben die eine Wellendrehung ins Schnelle z.B. i=10 übersetzt – damit also eine Wellenumdrehung in 10 Umdrehungen der Messwelle übersetzt – erlaubt eine deutlich höhere Genauigkeit die auch gleich über einen Messumformer digital erfasst und gespeichert wird. Über mehrere parallele Messspuren kann die Drehrichtung und die absolute Winkellage erkannt werden, wenn wieder ein bestimmter Versatzwinkel zwischen den Spuren besteht.
Meistens sind es 2 Spuren mit 90° Phasenversatz zueinander. Diese Spuren werden auch SINUS-COSINUS-Spuren genannt.
Quelle: http://www.fachlexika.de
Quelle: http://www.fachlexika.de
Singleturn-Encoder
Einfachste Form ist ein Singleturn-Encoder der aus mehreren konzentrisch angeordneten Spuren besteht. Singleturn bedeutet einen Winkel über 360 Grad pro Umdrehung (einschrittiger Winkeldekoder).
Quelle: http://www.fachlexika.de
Multiturn-Encoder
Auf Verwendung mehrerer Code-Scheiben die über Präzisionsgetriebe aufeinander abgestimmt sind, beruht die Funktion des Multiturn-Encoders. Hierbei muss die Auflösung der Übersetzung gleich der Auflösung der einzelnen Scheibe sein.
Quelle: http://www.fachlexika.de
Die Anzahl der Bits bezeichnet die Anzahl der Datenspuren (siehe Beispielbild für einen 5-Bit-Encoder). Dieser kann 25 Winkelgrade pro Umdrehung detektieren, also 32 Teile von 360° = 11,25° Winkelauflösung.
Auf dem Messgeber bzw. Messlineal wird jeder Wegschritt durch eine Kombination von Hell- und Dunkelfeldern (Low/High-Signal) ausgedrückt. Jeder Wegschritt entspricht einem anderen Bitmuster, das fortlaufend von einem Bezugspunkt aus, in einem bestimmten Binärcode numeriert ist. Das diskrete binäre Muster, stellt exakt die Weg- oder Winkelposition dar. Diese ist um so genauer, je größer die Anzahl der Spuren, d. h. Bits ist. Mit Absolutwertgebern werden heute Teilungen bis zu 25 Bit (33 Millionen Positionen) erzielt. Die Codierung kann im Graycode, Binärcode oder BCD-Code erfolgen. Vorteilhaft ist ein einschrittiger Code (Gray Code), der gewährleistet, dass sich von Position zu Position jeweils nur ein Bit ändert. Dies führt zu einer zuverlässigen Abtastung des Codes und somit der Positionen.
Die Daten an die Folgeelektronik werden vorwiegend seriell übertragen. Hierzu eignet sich eine digitale, bidirektionale Schnittstelle für Messsysteme wie beispielsweise das EnDat-Interface. Durch die Erhöhung der Taktfrequenz auf 8000 kHz (durch Laufzeitkompensation der RS485-Schnittstelle) und der Erhöhung der Auflösung auf 25 Bit (ca. 33 Mio. Messschritte pro Umdrehung) bei Drehgebern können die inkrementalen Signale bei absoluten Messsystemen entfallen. Die neue Schnittstelle EnDat2.2 reduziert Kosten und Einbauraum. Aufgrund der seriellen Übertragung reichen für EnDat2.2 sechs Leitungen (2x Spannungsversorgung, 2x Clock-Signal, 2x Datensignal) aus. Durch die Reduzierung der Leitungszahl können die weit verbreiteten 8poligen M12-Stecker eingesetzt werden. Auch die Folgeelektronik kann kompakter ausgeführt werden, da die Analogeingänge und die Unterteilungselektronik entfällt. Eine Verwendung von EnDat2.2 für inkrementelle Messgeräte ist möglich.
Datenprotokolle für Encoder
Aktuelle Encoder sind anders die beiden analogen SINUS-COSINUS-Spuren über digitale Elektronik ausgestattet, die neben der Messwandler auch Protokolle zur Kommunikation bereitstellt. Durch diese Kommunikation wird die der Datenaustausch standardisiert und im Falle eines Defekts kann ein Encoder einfach getauscht werden. Dazu stehen verschiedene (serielle) Protokolle bereit.
SSI: Synchronous Serial Interface (unidirektional)
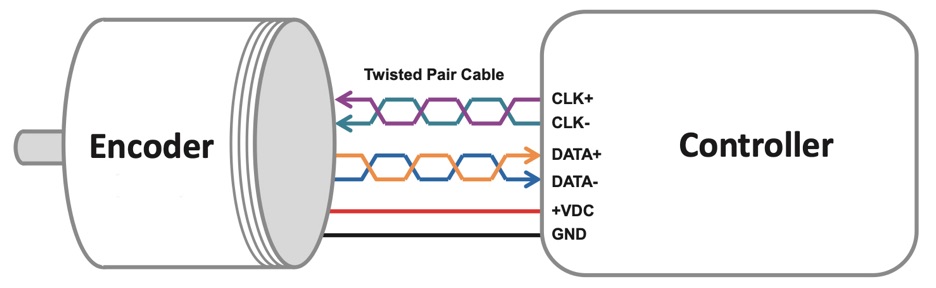
Das SSI-Protokoll liefert zeitsynchron Informationen. Über die Vorgabe eines Arbeitstakts wird die Übertragungsrate gesteuert. Dazu werden Informationen vom Encoder zum Controller (Auswerteeinheit) übertragen. Der Takt kommt vom Controller mittels der CLOCK Leitung. Alternativ kann auch gepulst übertragen werden.
Es werden 6 Leitungen benötigt: Neben der Masse noch die Spannungsversorgung +5VDC oder +3,3 VDC.
Das CLOCK-Signal wird über ein verdrilltes Kabel (Twisted-pair) einmal mit PLUS-Spannung und einmal mit MINUS-Spannung übertragen. Das negativierte Signal nennt man invertiert und hilft dabei Fehler bei der Datenübertragung sichtbar zu machen. Die Datenübertragungsrichtung findet vom Controller zum Encoder statt.
Das DATA-Signal ist ebenfalls ein verdrilltes, invertiertes Signal mit der Übertragungsrichtung vom Encoder zum Controller.
Die beiden invertierten Datenleitungen CLOCK UND DATA werden per RS-422 Standard übertragen. Dabei kann die Taktung für die Übertragungsrate 1,5 MHz betragen.
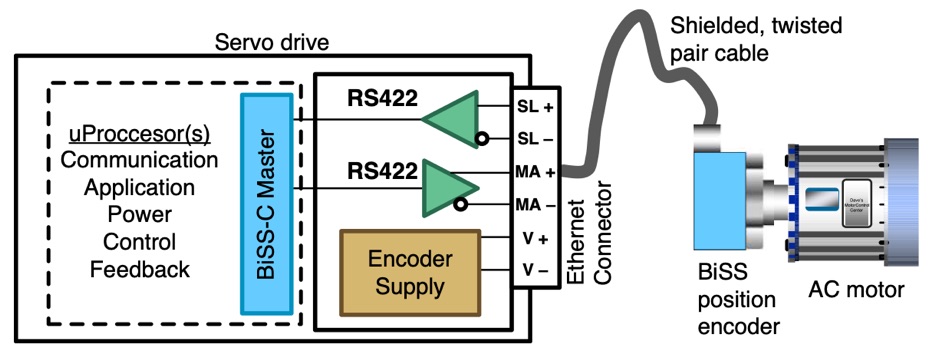
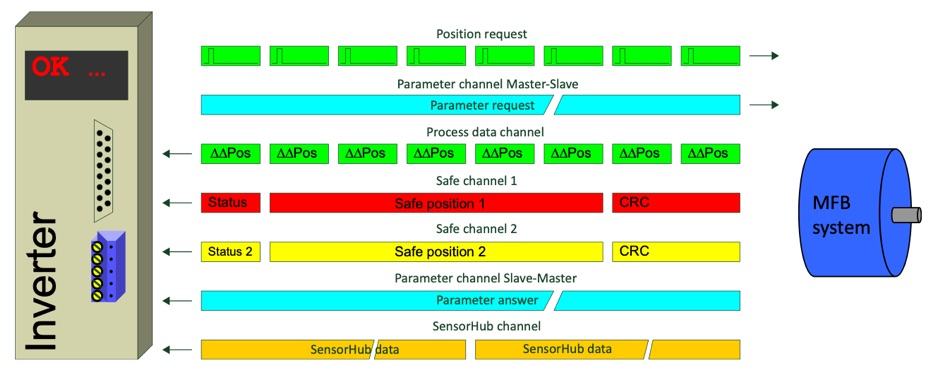
BiSS: Bidirectional Synchronous Serial Interface
Das BiSS-Protokoll ist dem SSI sehr ähnlich, hat allerdings einige Unterschiede. So ist die Übertragungsrate mit 10 MHz deutlich schneller aber auch ein Datenaustausch in beide Richtungen ist immer möglich. BiSS-Encoder können auch zusätzliche Daten übertragen wie die Temperatur (die für die Temperaturkalibrierung im Encoder ermittelt wird), so fern der Controller diese anfrägt.
Dabei kann über die bidirektionale Kommikation vom Controller etwas an den Encoder geschickt werden, und dieser liefert dann Messwerte zurück. Auch zum Nullen einer bestimmten Winkelposition ist das von Vorteil. Es werden dabei Daten in die Register des permanenten Encoderspeichers abgelegt.
Um diese hohe Datenübertragungsrate zu erziehlen kommt ein vorher im Encoder hinterlegbarer Zeitversatz (transmission delay) zum Einsatz, dadurch können 10 Mbps erreicht werden. Besonders bei längeren Kabellängen ist diese Parameter wichtig, um trotz der längeren Signallaufwege eine sehr hohe Übertragungsrate zu erreichen.
Hiperface DSL
Beim Hiperface DSL handelt es sich um eine Datenübertragungsart, die auf eine bestehende Leitung (beispielsweise eine Motorphase) nutzt und dabei seine eigene Informationen mit dem Trägersignal überlagert. Ein solcher Encoder benötigt somit keinerlei eigene Kabelverbindung, auf der Seite des Controllers wird die Encoderinformation dann wieder aus dem Trägersignal dekodiert.
Quelle: Sick
Dieses Verfahren ist eigentlich kein offenes System sondern ein proprietäres von der Firma SICK. Es ist aber möglich, dieses Verfahren zu lizenzieren und zu benutzen.
Hiperface DSL nutzt den RS-485 STandard und bietet eine Datenübertragungsrate von 9375 Mbaud.
EnDat 2.2
Beim EnDat 2.2 Protokoll kommt ebenfalls ein proprietäres Verfahren zum Einsatz. Dieses ist von der Firma Heidenhain entwickelt worden und ist das am weitesten verbreitete Verfahren.
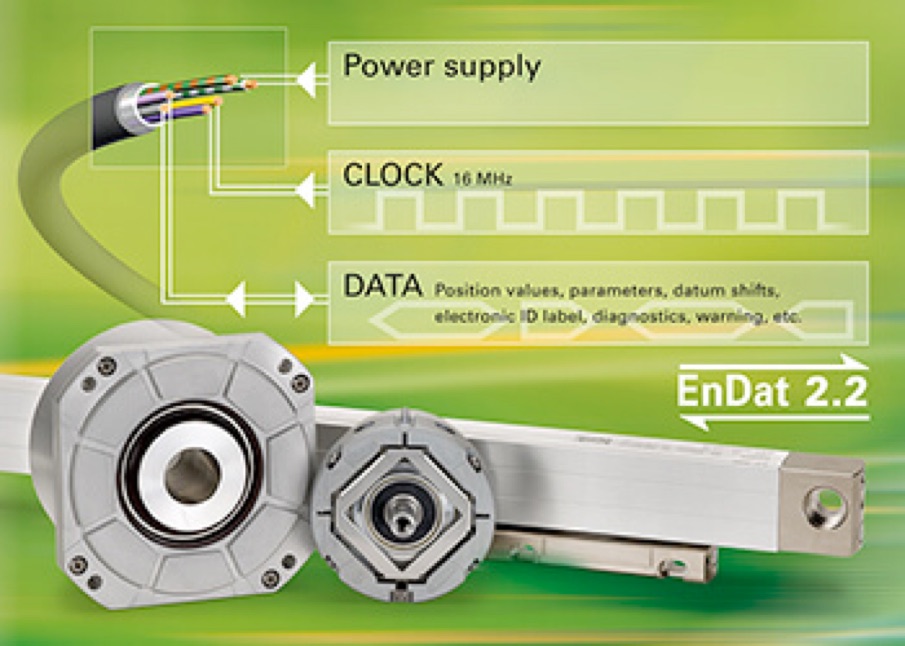
Quelle: Heidenhain
Es können Übertragungsraten von maximal 16 MHz mit Signalwegskompensationen erreicht werden, die Standardrate beträgt 2 MHz.
EnDat 2.2 kann den Encoder auslesen, beschreiben und Informationen in dessen Permanentspeicher aktualisieren. Über eine Diagnosefunktion kann der Zustand des Encoders ermittelt werden. Dieser Datenaustausch ist möglich indem Befehle vom Controller an den Encoder geschickt werden.