Sonntag, 23. September 2018


Modalanalyse einer Gelenkwelle hinsichtlich Biegeschwingungen
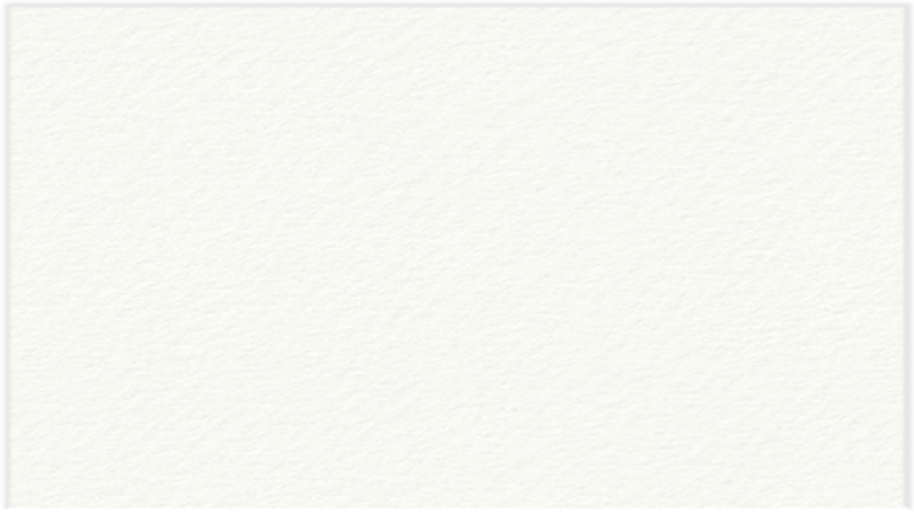
Bei der Modellierung einer Gelenkwelle hinsichtlich der Untersuchung der Biegeschwingungen wird die Gelenkwelle in 3 separate Teilmodelle (CATParts) zerlegt:
•Gelenkkopf links
•Gelenkkopf rechts
•Welle
Da bei der FE-Analyse mittels CATIA-FEM (GAS-Modul) bisher immer nur Bauteile fest miteinander verbunden wurden (z.B. verschraubt, verpresst usw.), muss diesmal ein Gelenkpunkt modelliert werden.
Für die Biegeschwinungsuntersuchung kann die Welle einzeln untersucht werden. Dazu müssen die Gelenkpunkte ermittelt und im Raum fest gespannt werden. Die Welle kann sich als elastisches FE-Bauteil um diese Gelenkpunkte beliebig drehen.
Dazu wird die Mitte der zylindrischen Außenfläche in welche die Kugelbahnen eingebracht sind als „Virtual Part“ angelegt. Dazu wird ein „Rigid Spring Virtual Part“ erzeugt, die Fläche angewählt und ein Punkt in die Mittelachse der Welle in der Mitte der Außenfläche ausgewählt.
Beide Virtual Parts werden dann jeweils für einen „Ball Joint“, also einer kugelförmigen Einspannung im Raum verwendet. Das alleine reicht für CATIA V5 noch nicht, zusätzlich ist noch eine „User-defined Restraint“-Einspannung nötig, bei der dann eines der beiden Virtual Parts ausgewählt und der Drehfreiheitsgrad der Wellenachse festgehalten wird. Formal ist das nicht nötig, aber ohne dieses KE zeigt CATIA immer wieder die Meldung an, dass ein Freiheitsgrad offen ist.
Zum Modellaufbau:
Zu den üblichen KEs Vernetzungseinstellungen „OCTREE Tetrahedron Mesh“ und den 3D-Properties kommen jetzt noch 2 „Rigid Spring Virtual Parts“ hinzu.
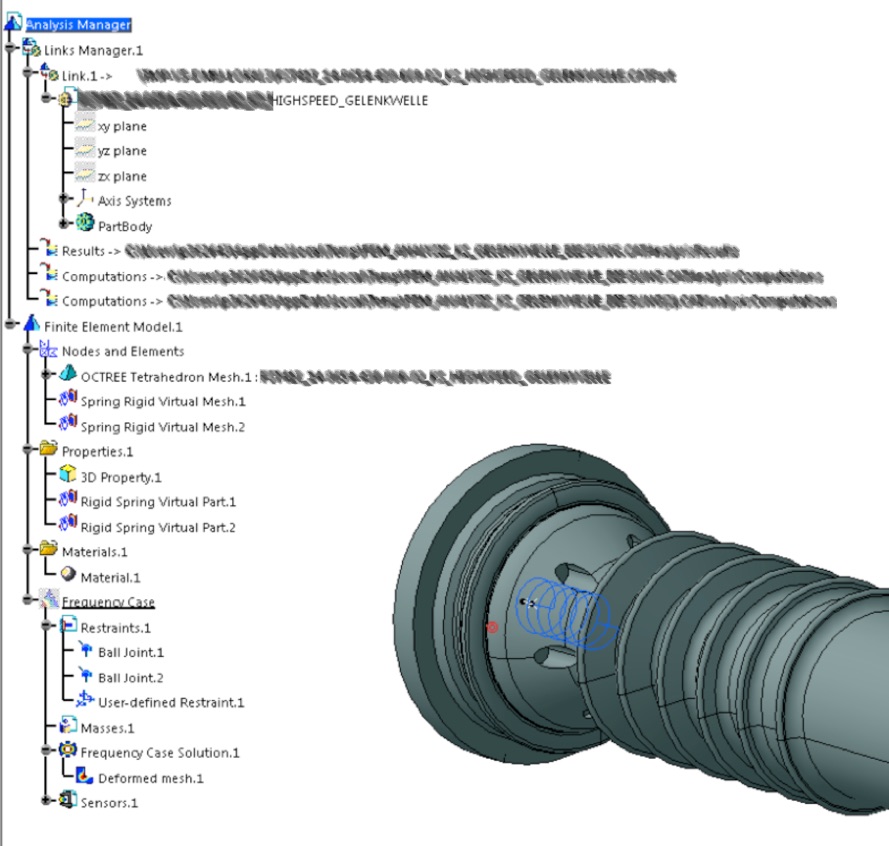
Diese kann man sich wie Verknüpfungselemente zwischen realer Geometrie (hier die zylindrischen Außenflächen) und virtuellen KE-Elementen wie Punkte, Linien oder ähnliches vorstellen. Hier wird eine Fläche mit einem auf der Drehachse liegenden Punkt … unser Gelenkpunkt der Gelenkwelle … verknüpft. Das passiert an beiden Seiten der Gelenkwelle.
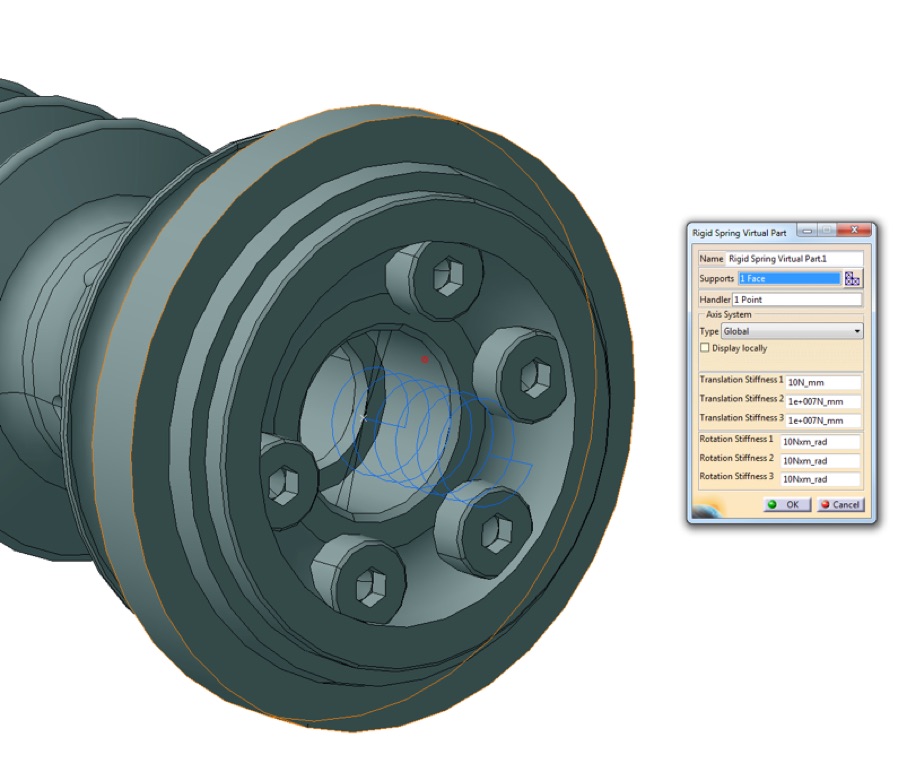
Es wurde das KE „Rigid Spring Virtual Part“ verwendet, weil dieses nicht ideal steif den Punkt im Raum einspannt, sondern mit frei zu definierten Federkennwerten. Prinzipiell kann auch mit dem „Rigid Virtual Part“ gearbeitet werden.
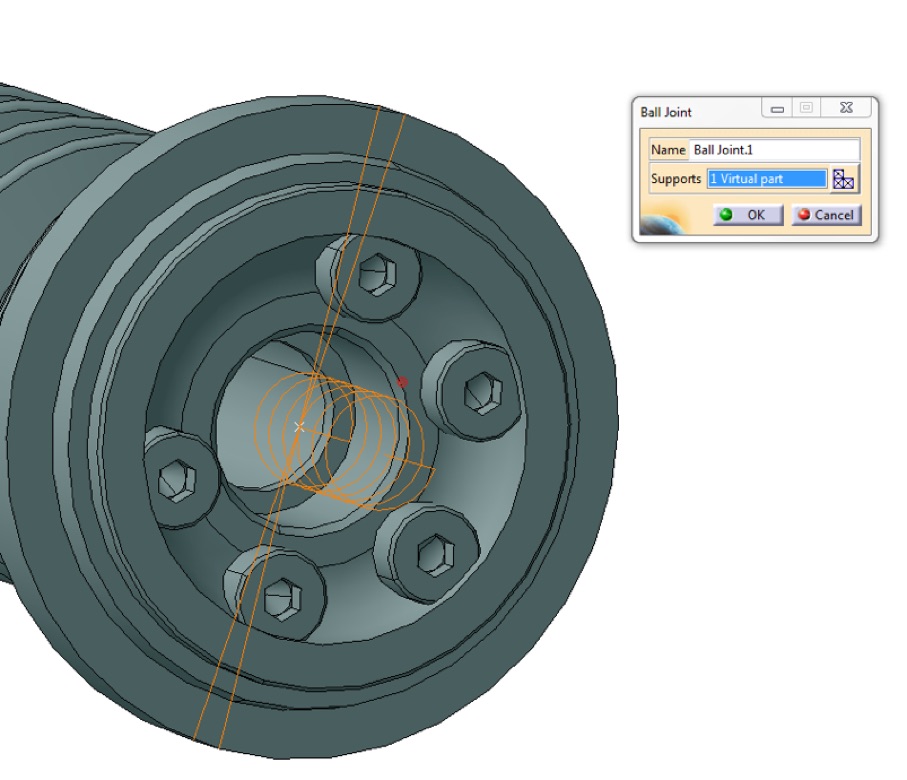
Als nächstes wird eine Einspannung zum raumfesten Koordinatensystem mittels des KE „Ball Joint“ verwendet, welches jeweils eines der Virtual Parts als Bezugselement bekommt.
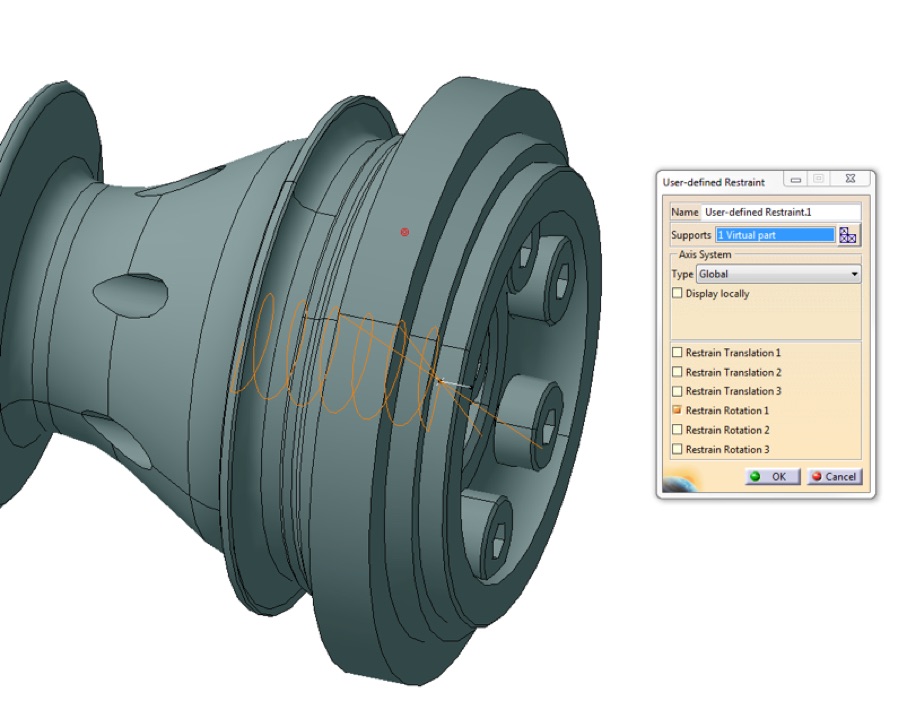
Obwohl das so bereits korrekt und ausreichend Modelliert ist, benötigt CATIA noch zusätzlich eine Einspannbedingung mittels des KE „User-defined Restraint“, bei dem ebenfalls ein Virtual Part als Bezug genommen wird. Wir schränken eine rotatorische Achse ein.
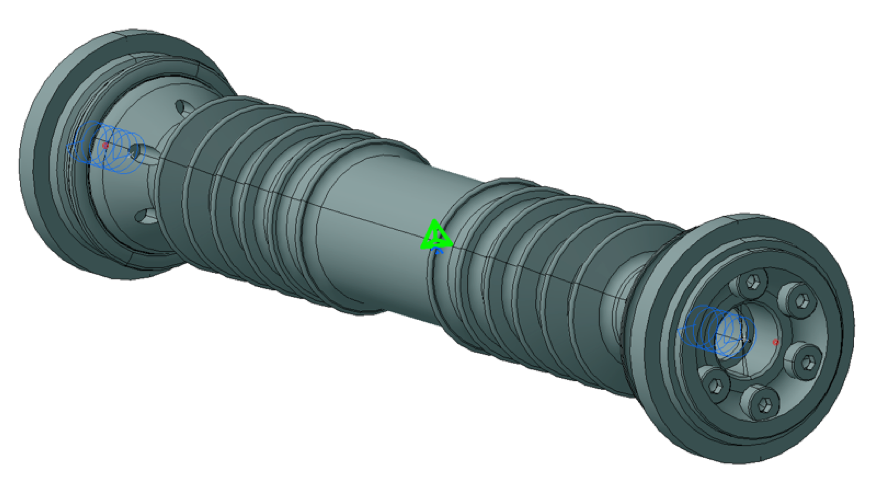
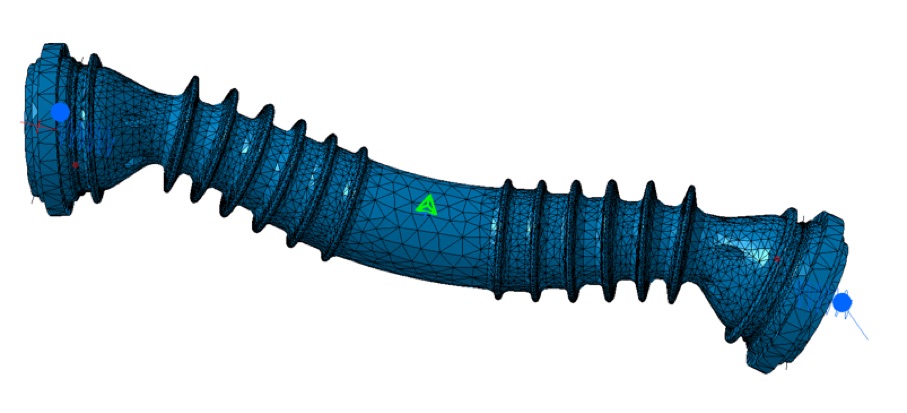
Vernetzung:
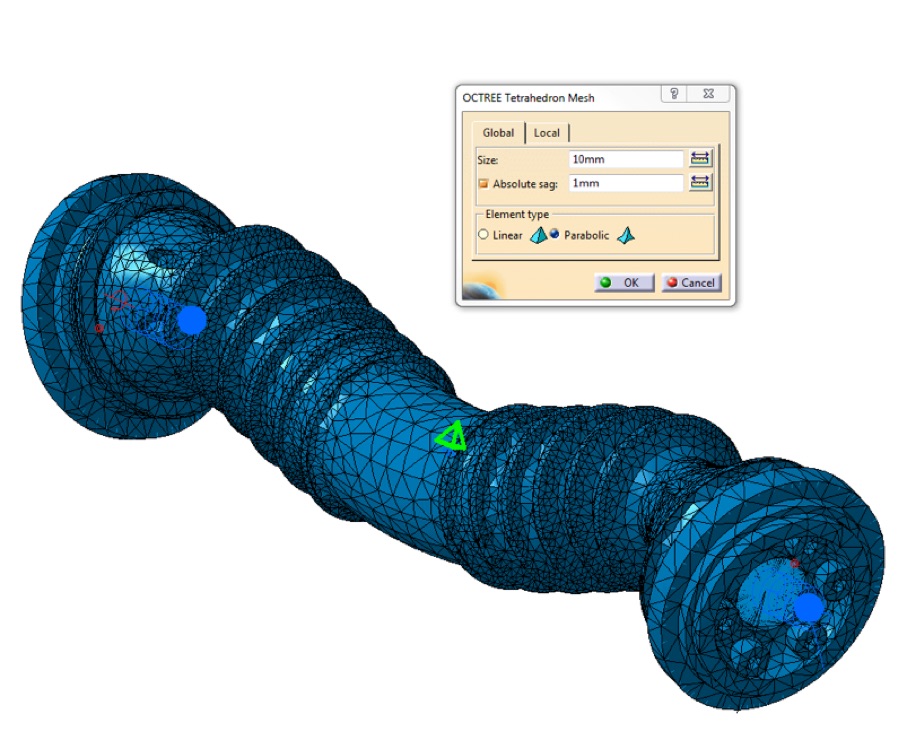
Die Vernetzung ist bei Frequenz-Analysen nicht so wichtig. Dennoch sollte nicht allzu grob modelliert werden. 10 mm Elementgröße und 1mm max. zul. Durchhängung sind hierbei ein recht guter Wert.
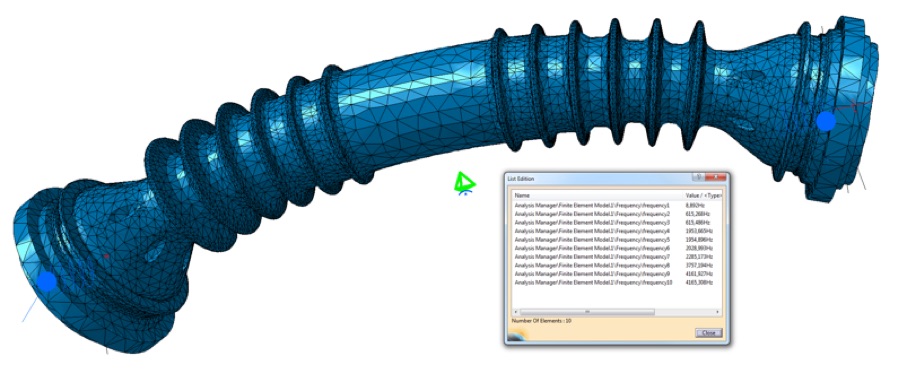
Als Ergebnis kann man sich dann die Frequenzliste anzeigen lassen. Über die Anzeige-Funktion (Film-Symbol) kann man sich die jeweiligen Eigenmoden anzeigen lassen.