Dienstag, 2. Oktober 2018


Modalanalyse eines Wellenstrangs hinsichtlich Biegeschwingungen
Im Folgenden soll ein Wellenstrang hinsichtlich Biegeschwinungen untersucht werden. Dazu werden die Bauteile dieses Wellenstrangs als CAD-Volumenmodelle benötigt. Diese bekommen dann jeweils eine Werkstoffzuordnung (Dichte, Querkontraktionszahl, E-Modul) zugewiesen. Weiterhin müssen die Bauteile realisitisch miteinander verbunden werden, idealerweise steif und fest miteinander. Über die Lagerung werden die Bauteile mit dem raumfesten Koordinatensystem verbunden. Hierbei können die Lagerstellen ideal steif modelliert werden, oder auch über eine Lagersteifigkeit die Gehäusesteifigkeit mit berücksichtigt werden.
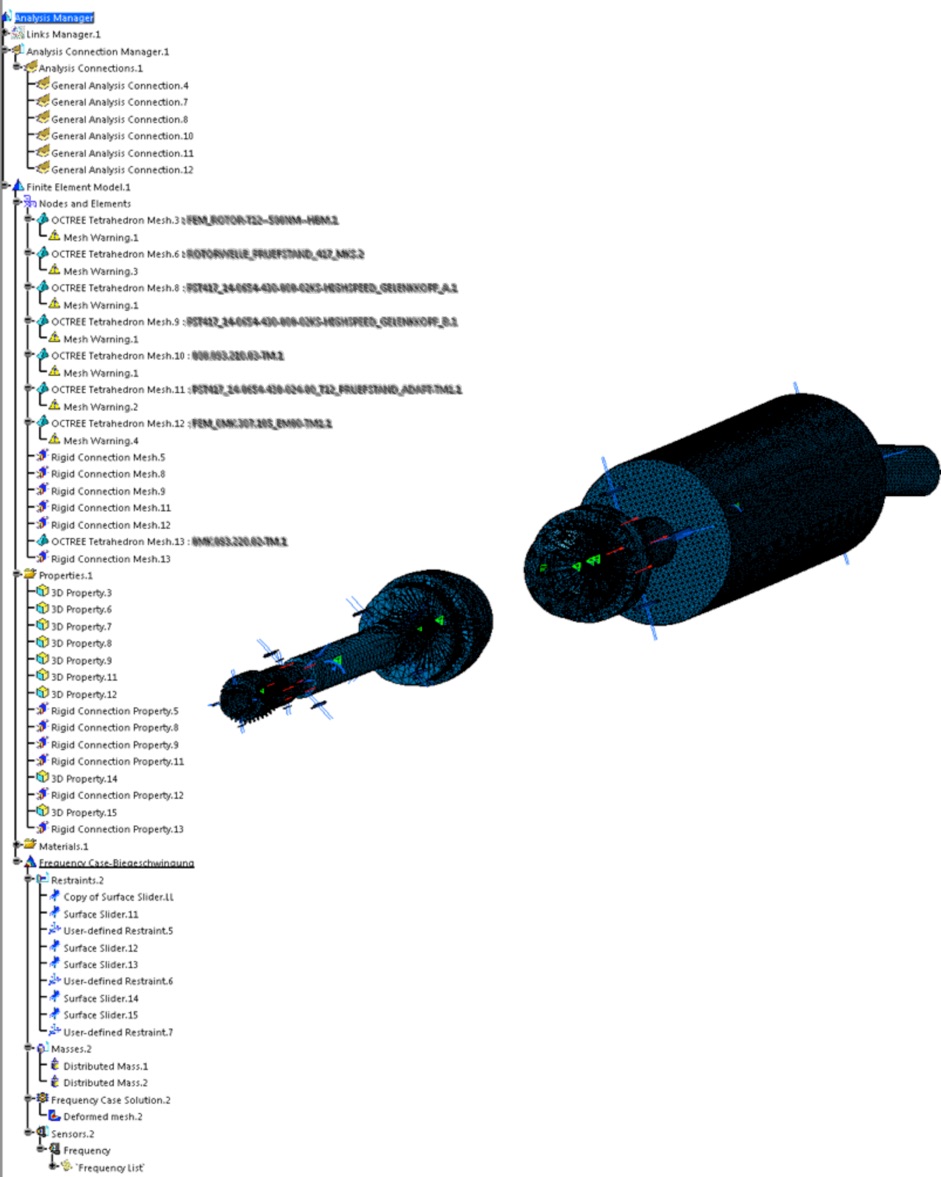
Bei der Modellierung einer Gelenkwelle hinsichtlich der Untersuchung der Biegeschwingungen besteht der Wellenstrang aus diesen Teilmodellen (CATParts):
•Getriebeeingangswelle
•Adaptions-Rotorwelle
•Rotor des Drehmomentmessflansch T12
•Gelenkkopf links
•Gelenkkopf rechts
•Adapterscheibe A
•Adapterscheibe B
•Prüfstands-Rotorwelle
Im Biegeschwingungs-Modell wird die Zwischenwelle der Gelenkwelle weggelassen, der Wellenstrang ist also aufgetrennt und besteht aus 2 unabhängigen Teilwellen. Die Biegefrequenzen der Zwischenwelle alleine wird in einer eigenen Gelenkwellen-Modalanalyse durchgeführt und dann in der Ergebnisbetrachtung wieder zusammengeführt.
Wichtig: bei der Modalanalyse oder Frequenzuntersuchung werden standardisierte Anregungen vom FE-Programm eingeleitet. Diese entsprechen nicht der Realität, sondern regen nur in allen Freiheitsgraden an. Bei der Ergebnisbetrachtung kommt eine Frequenztabelle und ein Biegemode heraus. Die Amplitude dabei ist fiktiv und dient nur der optischen Visualisierung der Biegeschwingung. Beträge von Biegeschwingungsamplituden können mit dem hier verwendeten Werkzeug nicht ermittelt werden … dazu bedarf es eines anderen CATIA-Moduls und der genauen Kenntnis der Anregungsrichtung und Stärke (Weg, Frequenz). Auch die Dämpfung ist dann von Bedeutung. Diese Betrachtung wird im weiteren außen vor gelassen, es sollen nur die Frequenzen ermittelt werden.
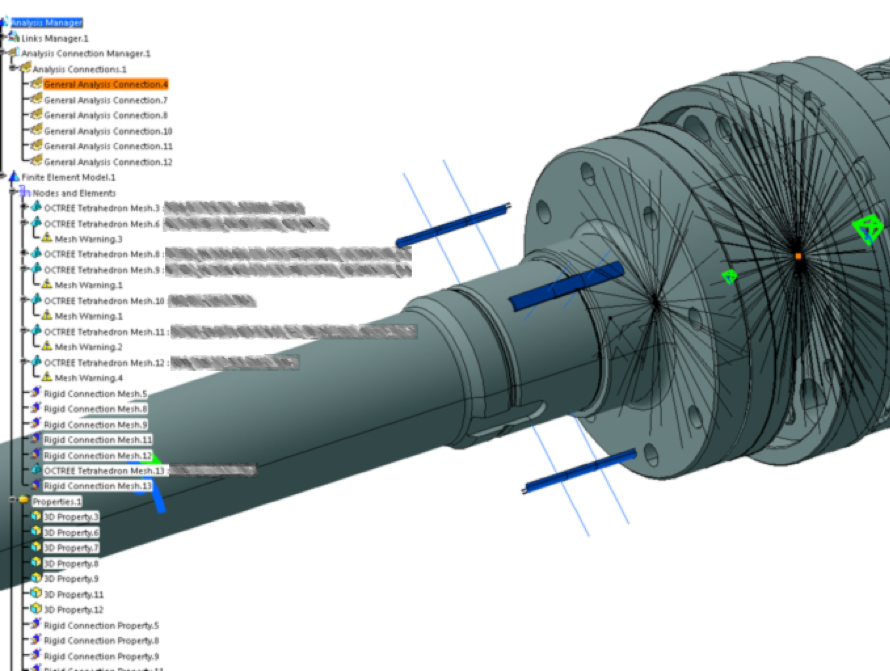
Zum Modellaufbau:
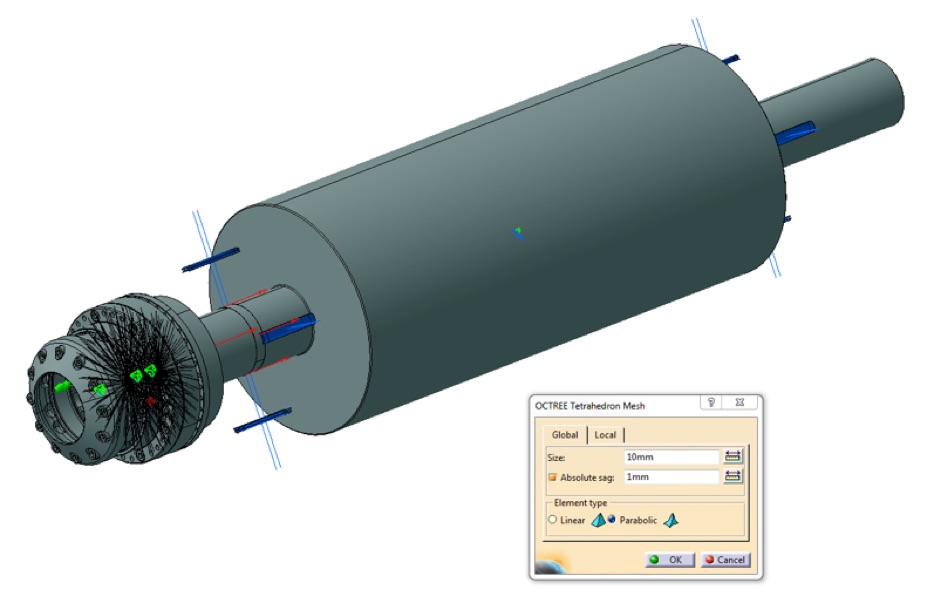
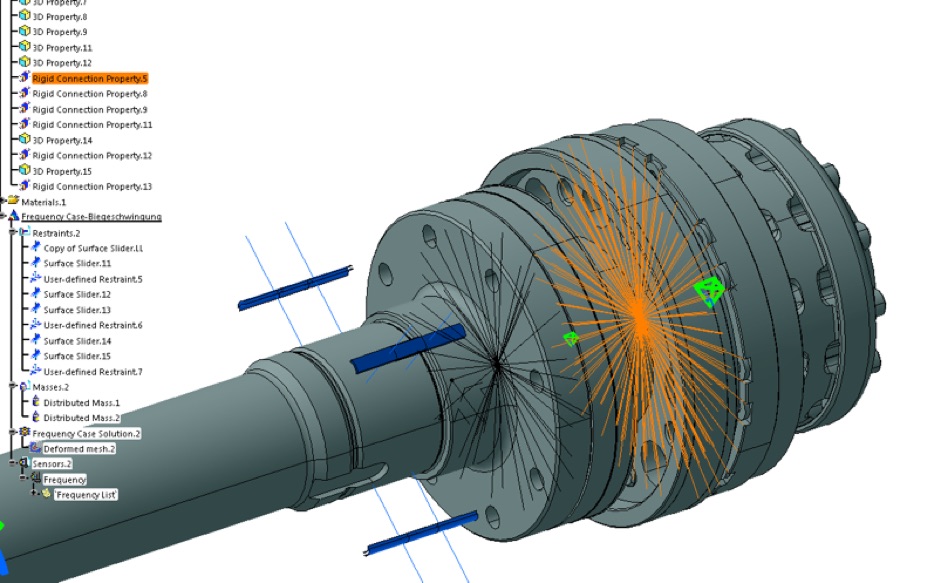
Zu den üblichen KEs Vernetzungseinstellungen „OCTREE Tetrahedron Mesh“ und den 3D-Properties kommen jetzt noch 2 Massen.
Für die Vernetzung genügt ein recht grobes Netz, da die ermittelten Resonanzfrequenzen mit feiner werdendem Netz sich nicht sonderlich verändern. Für den ersten Schuss reicht eine Netzgröße von 10mm und eine max. Durchhängung von 1mm bei parabolischem Elementtyp (quadratischer Elementtyp).
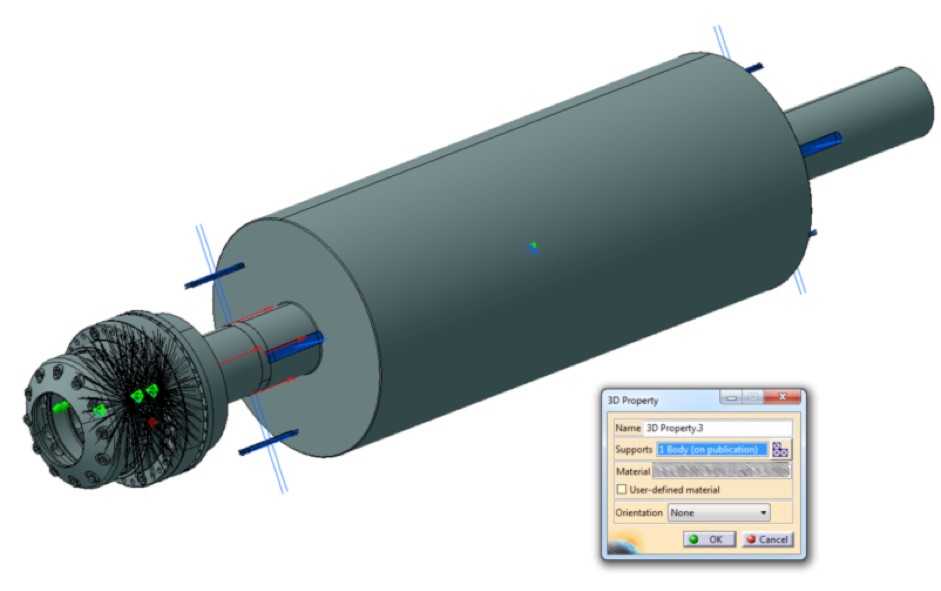
Jedes Bauteil im Modell muss mit einem Vernetzungs-KE versehen werden. Diesem Vernetzungs-KE wird dann noch ein „3D-Property“ zugewiesen, was eine Werkstoffzuweisung mit den mechanischen Werkstoffdaten E-Modul, Querkontraktion und Dichte entspricht.
Die Bauteile müssen miteinander verbunden werden, am einfachsten als feste Verbindung wie einer Art Verklebung. Das entsprich dann einer Flansch-Verschraubung oder einer Steckverzahnung.
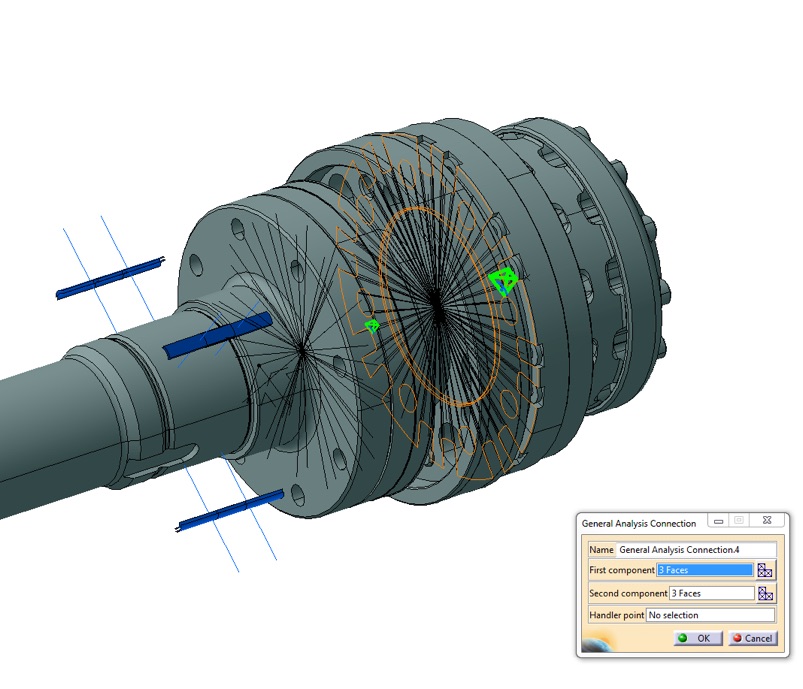

Dazu wird eine „General Analysis Connection“-KE angelegt, und dann von beiden Bauteilen die jeweiligen Kontaktflächen ausgewählt … zuerst alle Flächen der einen Komponente/Bauteil, dann das des anderen.
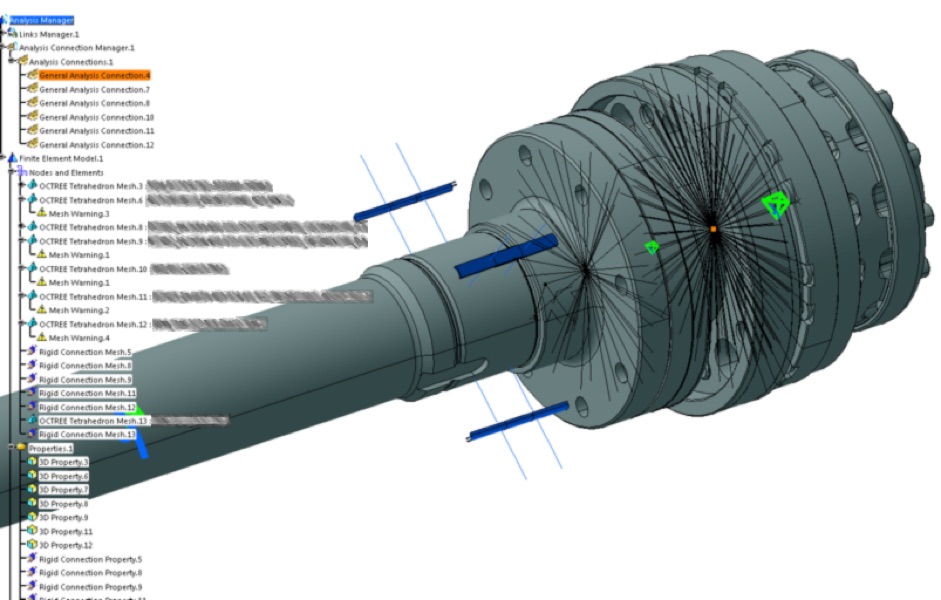
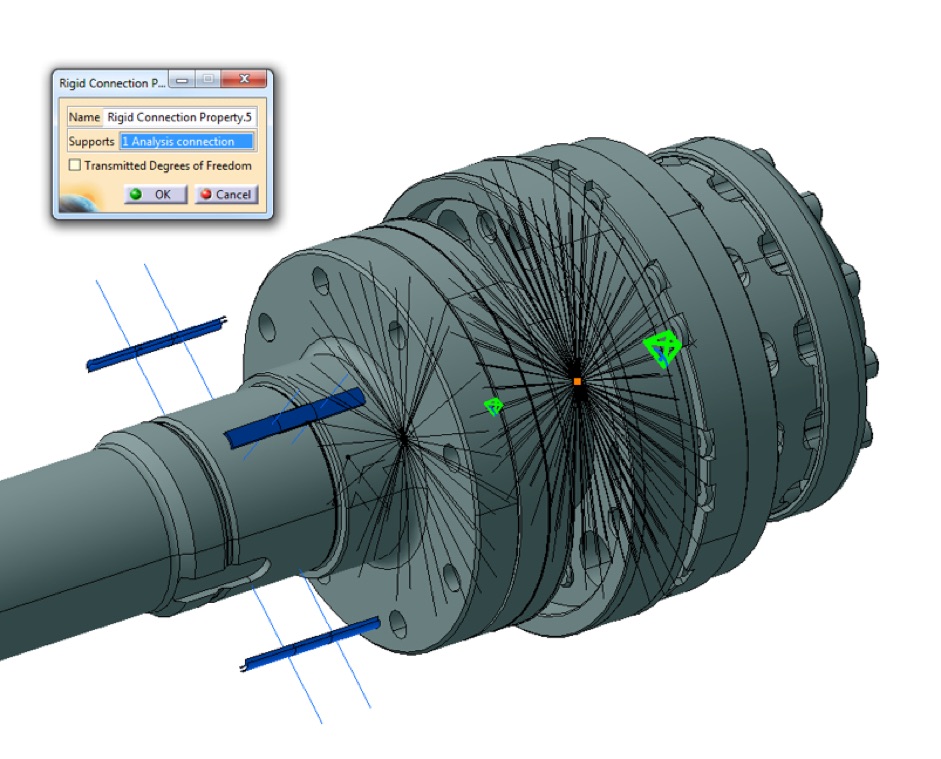
Um die Verbindung zu einer festen Verbindung von 2 Bauteilen zu machen, wird noch ein „Rigid Connection Property“ definiert.

Es wird dabei die Flächen-Verbindung ausgewählt und dabei auch ein automatisches Vernetzungs-KE angelegt. Dieses kann nicht bearbeitet werden, sondern wird unter „Nodes and Elements“ angezeigt.
Zu den Einspannbedingungen:
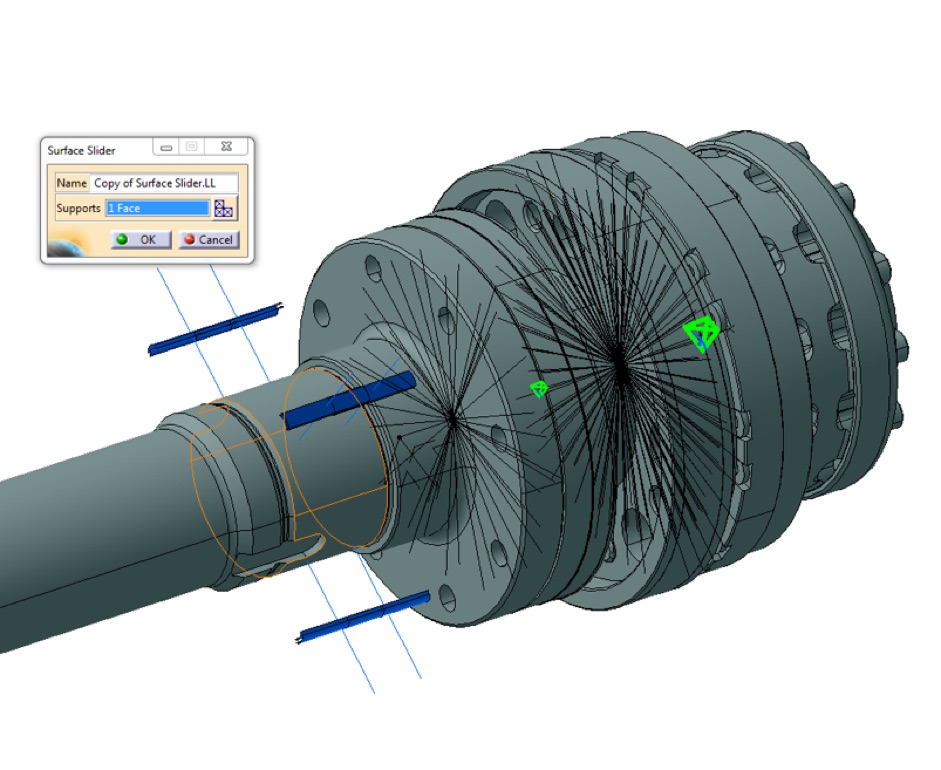
Es werden die Lagerstellen als ideal steife Lager definiert, das heißt es wird nur die Drehbewegung und die axiale Bewegung zugelassen. Mit dem „Surface Slider“-KE werden quasi Loslager defininiert.

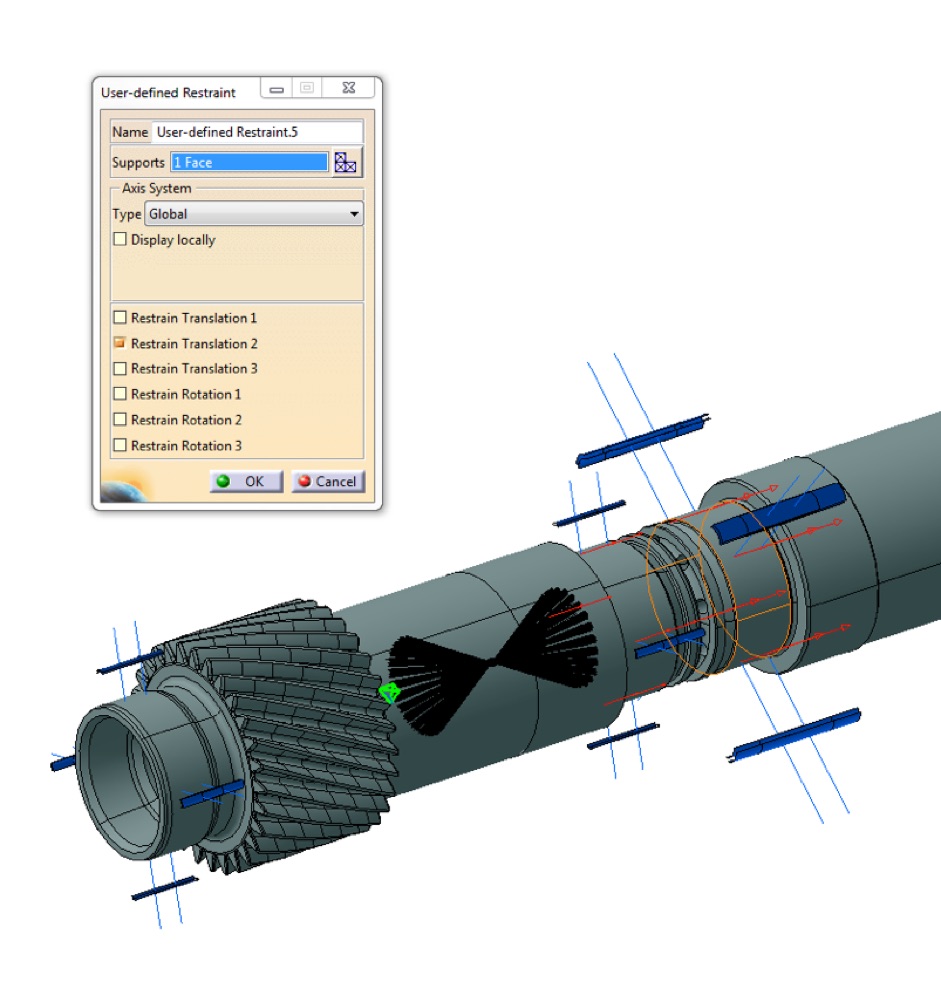
Sollen Festlager daraus modelliert werden, so wird noch ein „User-defined Restraint“-KE definiert. Hier wird dann die axiale translatorische Bewegung eingeschränkt.

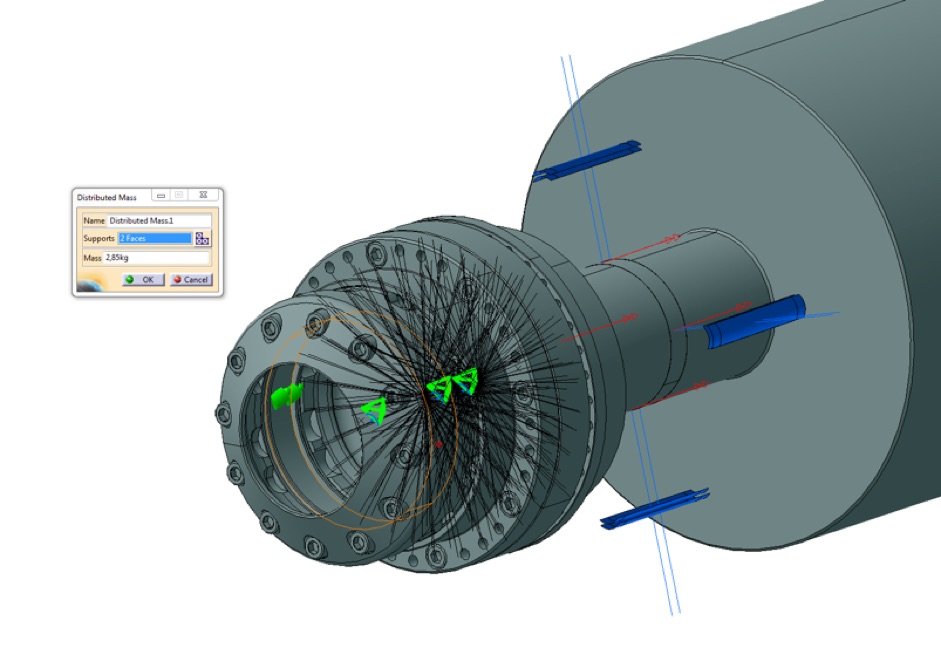
Es werden noch Zusatzmassen mit berücksichtigt, welche sozusagen die Hälfte der Zwischenwelle entsprechen. Diese werden im Kugelgelenkpunkt mit auf eine Fläche „geheftet“.
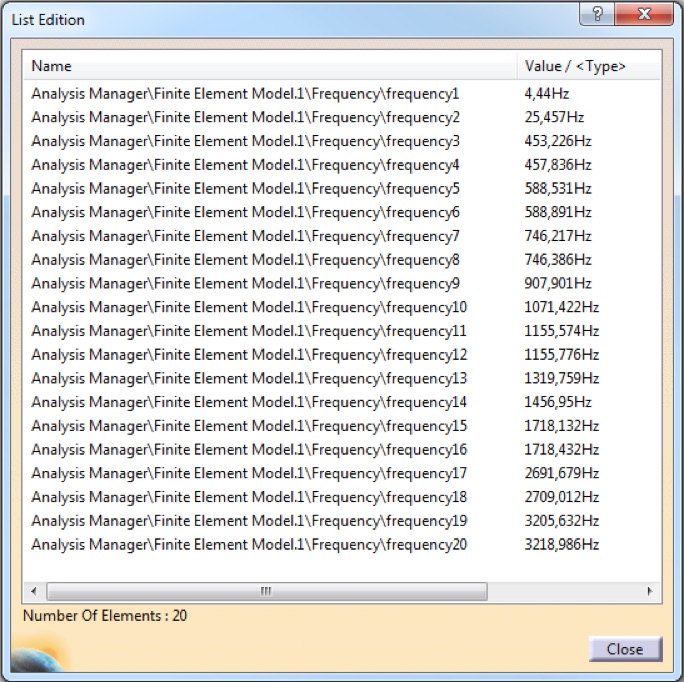
Nach erfolgter Berechnung (kann schon 10-20 Minuten dauern) kann als Ergebnis die Frequenzliste angezeigt werden.
Da der Drehfreheitsgrad nicht eingeschränkt wurde ist die erste Eigenfrequenz eine Starrkörperbewegung nahe 0 Hz. Diese kann ignoriert werden. Alle weiteren Frequenzen können mit dem Film-Symbol animiert dargestellt werden. Die einzelnen Eigenmoden werden dann dargestellt. Es werden auch Axialschwing-Moden und Dreheigenfrequenzen angezeigt, die bei diesem Modellaufbau für Biegeeigenfrequenzen ignoriert werden sollten (hierzu fehlen Massenträgheiten und Federsteifigkeiten).
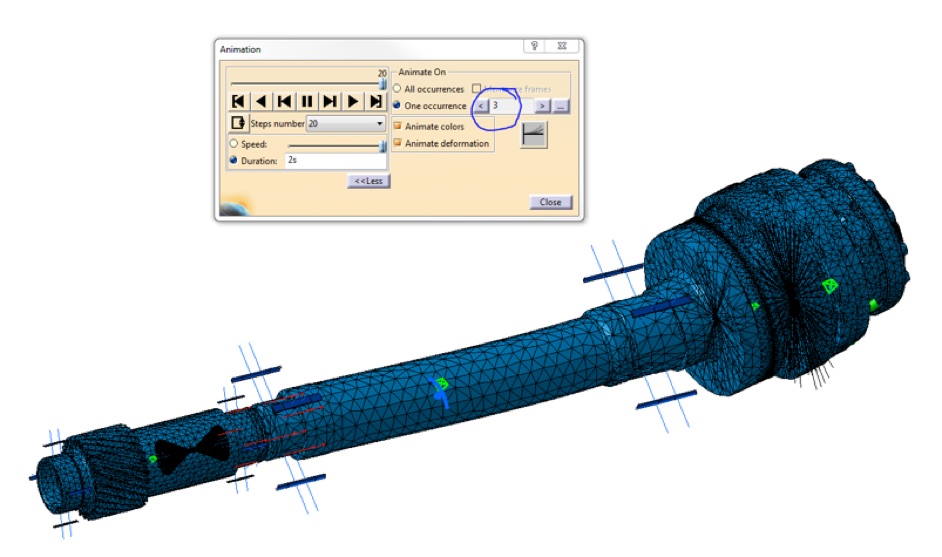
Der Mode kann bei „one accurrence“ ausgewählt werden.