Mittwoch, 17. Mai 2017


4. Teil - Das Verteilergetriebe
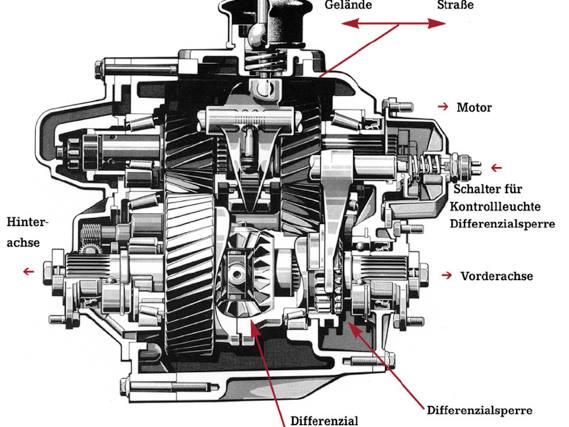
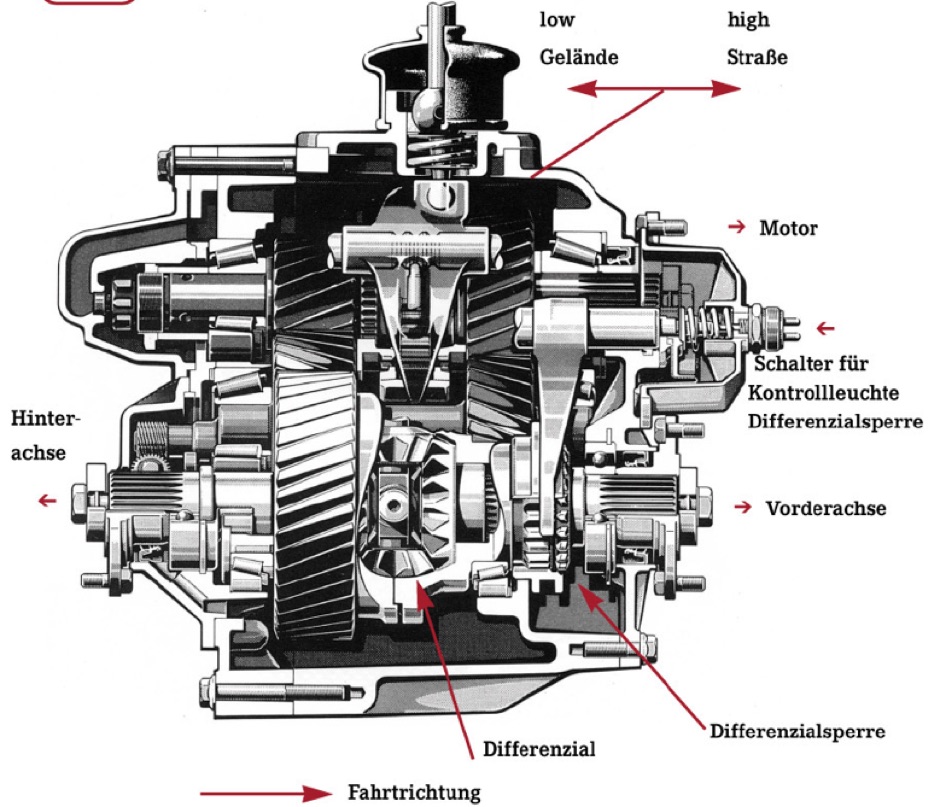
Im vierten Teil möchten wir uns das Verteilergetriebe für die Längsverteilung genauer ansehen. Dieses wird aus mehreren Blöcken zusammengebaut.
Das Verteilergetriebe hat einen Eingang vom Schaltgetriebe her kommend. Dann kann über eine synchronisierte Schaltung die Straßen- oder Geländeuntersetzung gewählt werden. Dann geht es auf eine zweite Welle auf einen Differentialkorb. Dieser kann Drehmoment sowohl an die Vorderachse als auch die Hinterachse im Verhältnis 50:50 verteilen. Optional kann jetzt auch ein Differentialsperre geschaltet werden, welche die Vorderachse mit der Hinterachse formschlüssig verbindet.
Sensoren erkennen die beiden Schaltzustände (wahlweise Straße/Gelände und Differentialsperre).
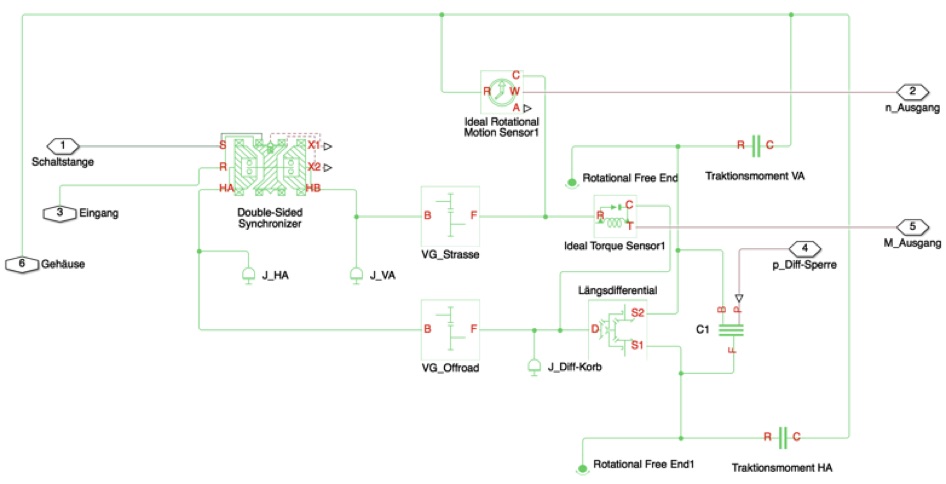
Beim Modellaufbau des Verteilergetriebes werden folgende Simulink-Blöcke verwendet:
Mittels eines „Double-Sided Synchronizer“-Block kann zwischen der Straßenübersetzung und Geländeuntersetzung geschaltet werden. Dabei kommt eine synchronisierte Sperrsynchronisierung zum Einsatz, wie sie bei Handschalt- und Doppelkupplungsgetrieben üblich ist.
Funktion einer Synchronisierung

Dabei wird eine Schaltstange verschoben, deren Schaltgabel in die sich drehende Schaltmuffe eintaucht. Über die Schaltpatten wird die Axialkraft auf die Schaltmuffe übertragen und diese aus der neutralen Mittelstellung entweder nach links oder rechts geschoben.
Soll ein Gang eingelegt werden, so muss zuerst die Rückstellkraft der Mittenarretierung überwunden werden, ehe über das Druckstück die Vorsynchronkraft auf die Reibflächen zwischen Synchronring und Kupplungskörper wirken und die Differenzdrehzahl beginnen abzubauen. Dabei dreht sich der Synchronring durch Reibmoment in Sperrstellung und verhindert so den formschlüssigen Kraftschluss bei Differenzdrehzahl. Sobald Gleichlauf hergestellt ist, verschwindet das Reibmoment des Synchronrings und die Verzahnung der Schaltmuffe verdreht diesen derart, dass die Verzahnung formschlüssig eingreift. Die Verzahnung der Schaltmuffe kann jetzt auch bis über den Kupplungskörper weitergeschoben werden. Damit ist der Schaltvorgang abgeschlossen und der Gang eingelegt.
Wir betrachten im weiteren die Straßen-Übersetzung. Daher verbinden wir den Synchronkörper/Führungsmuffe (Anschluss R) mit dem Eingang. Danach wird der rechte Ausgang mit einer festen Übersetzungsstufe für den Straßengang verbunden, der linke Ausgang mit einer zweiten Übersetzungsstufe für den Geländegang. Die Schaltstange betätigt die Schaltmuffe und wird an den S-Eingang der Synchronisierung verbunden.
Es werden beide Ausgänge der 2 einfachen Getriebestufen verbunden und an den D-Eingang eines „Differential“-Blocks verbunden. Dieser stellt den Differentialkorb dar. Um das Drehmoment vor dem Differential zu messen, wird die Leitung unterbrochen und noch ein „Ideal Torque Sensor“-Messblock eingefügt.
Jeder Ausgang des Längsdifferentials stellt die Verbindung zu einer Achse dar. Jede Achse wird noch mit einer Reibkupplung abgebremst und damit ein Lastmoment erzeugt. Jetzt wird noch zwischen die beiden Achsen eine Reibkupplung (vereinfacht, korrekt wäre eine Klauenkupplung) eingefügt. Wir geben damit ein bestimmtes Sperrmoment vor, damit sowohl die Vorderachse als auch die Hinterachse Last übertragen können.
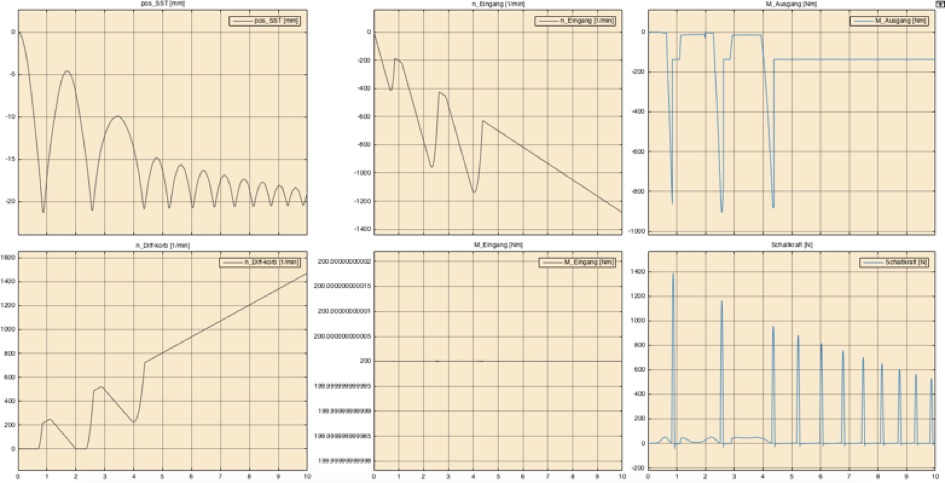
Beim gesamten Blockdiagramm werden noch einige Messauswertungen hinzugefügt und am Eingang ein ideales Drehmoment von 200 Nm aufgeprägt. Die Schaltkraft von 70 N wird ebenfalls über eine ideale Kraft erzeugt.